-

上海市机器人行业协会竭诚为您服务
人形机器人再添重要新成果,上海交大朱向阳团队开发「充气式仿生神经机械手」
在8月19日特斯拉AI日上,马斯克在活动上公布了特斯拉人形机器人,机器人名为Tesla Bot,和其他公司发布的卡通形象或者动物形象的机器人不同,特斯拉机器人和人类几乎一模一样。马斯克说,可能在明年推出这款机器人,它能够帮助人类从事一些无聊且重复性的工作。视频中以真人演绎了马斯克的人形机器人梦想,那么,这究竟是马斯克和特斯拉自己的“凡尔赛”,还是不久的将来真的现实呢?
人型机器人(英语:Android)集机、电、材料、计算机、传感器、控制技术等多门学科于一体,是一种旨在模仿人类外观和行为的机器人。
当前,人形机器人机器人运行方面的机、电、计算机、传感器、控制技术等领域的研究已愈发完善,如何将机器人做的更拟人,诸如外层皮肤,机械柔性夹爪等,更需要配合新材料、仿生技术等多方面的技术发展。



8月16日,国际著名期刊《自然·生物医学工程》(Nature Biomedical Engineering)发表了上海交通大学机械与动力工程学院机器人研究所朱向阳教授、谷国迎教授和麻省理工学院赵选贺教授的合作论文“操作感知一体化的软体神经假肢手”(A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback)。
研究团队开发了一款柔软而富有弹性、轻便、低成本的充气式仿生神经机械手EcoFlex,截肢者佩戴后,能够很好的完成拉拉链、倒水、递东西、抚摸宠物猫等各种操作,效果与刚性神经假肢一样好,某些方面甚至更好。

这款机械手集成了触觉反馈系统,能够为截肢者提供触觉,硬件成本仅500美元左右,重量也仅有292克,还非常耐用,在被锤子敲击或被汽车碾压后能迅速恢复。就像动画电影《超能陆战队》中充气机器人“大白”一样。
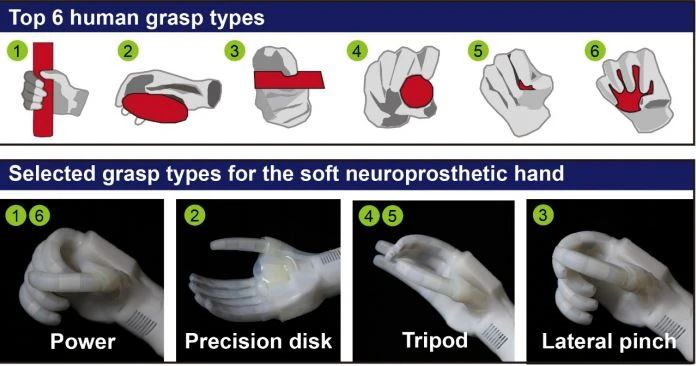
EcoFlex包括五个气球状的手指,每个手指都嵌入了纤维段,类似于人类手指上的关节骨。弯曲的软体手指连接到了一个3D打印的“手掌”之上。

不像市面上大多数的神经假肢那样让电机控制每个手指,而是使用一个简单的气动系统来精确的给手指充气,让它们可以在特定的位置弯曲或伸直。
该气动系统包括一个小型气泵和阀门,可以佩戴在腰部,有效地减轻了假肢本身的重量。

当人们想做出某种动作的时候,运动神经元会产生电信号以控制肌肉,该团队用现有算法解码肌电信号,并将其与常见的抓握类型相关联。气动系统通过与截肢者肢体相连的肌电传感器来接受这种信号,并以此控制神经假肢。
当截肢者想象自己拿着酒杯时,传感器就会接收到其肌电信号,然后控制器将其转换为相应的压力值。气泵会根据这些压力值来使每个手指关节产生相应的膨胀而弯曲,以此实现截肢者想要的抓握动作。
仅仅能实现抓握还不够,研究者希望能够让EcoFlex拥有触觉反馈,这是大多数商业神经假肢中没有的功能。
为此,它们在每个指尖上安装了一个压力传感器,当触摸或挤压到该传感器时,会产生与其感受到的压力成正比的电信号。每个传感器都与截肢者残肢的特定位置相连,比如当假肢的拇指被按压时,截肢者就可以感受到代表拇指的位置受到相应力度的刺激。
EcoFlex操作简便,招募的两名上肢截肢的志愿者仅经过15分钟的培训后,便可进行一系列的标准化测试。这些测试任务包括垒棋子、翻页、写字、举起较重的球体、捡起地上的草莓及面包等。
研究者同样让志愿者使用市面上用坚硬材料制作的仿生手进行了相同的测试,结果发现EcoFlex在大多数任务上和这些传统仿生手效果不相上下,甚至在某些任务上表现更好。
一名志愿者用上EcoFlex之后能够在日常生活中轻松的使用它,比如可以用来吃饼干、蛋糕、苹果等食物,也能使用笔记本电脑、瓶子、锤子、钳子等工具,甚至还能与人握手和“撸猫”。

软体驱动器因其轻便、成本低、顺应性好等优点,已经普遍被应用于柔性抓取、医疗康复和智能穿戴等领域中,在许多爬行、水下、手术机器人的身上也能看到软体驱动器的身影。低压驱动、高应变幅度与速度、易于制作、耐久性高,这些都是刚性驱动器无法做到的。
这种将软体驱动器与肌电控制、触觉反馈集成为一体的仿生假肢手,能够帮助截肢患者恢复灵巧的手部功能,还能让其感知到真正的手部触觉;和商用仿生假肢相比,不仅重量上大大减轻,制作成本也低了许多,这对于低收入家庭的截肢患者来说,具有巨大潜力。
论文全文链接:https://www.nature.com/articles/s41551-021-00767-0
朱向阳教授为上海交通大学机械与动力工程学院机器人研究所所长、上海市机器人行业协会理事、协会专家委员会特聘专家。
除了仿生机械手外,双足机器人也是人形仿生机器人的一大分支之一,由俄勒冈州立大学动力机器人实验室 Jonathan Hurst 领导的研究小组长期致力于摸索人类腿部运动的基本原理,并将他们的发现应用到双足机器人身上。日前,由Jonathan Hurst所创立的敏捷机器人公司正式向外界详细介绍了双足机器人平台 Cassie和加装手臂的 Digit 机器人,这两款机器人同时遵循一个最简单的数学模型:由一个质点 (代表上身) 连接到一对理想的弹簧(代表腿),所以这个模型也被称为“弹簧—质点模型”(spring-mass model)。虽然这是一个类似于简笔画的简化模型,没有考虑到关节或者脚在离散的点上不接触地面的情况,但该模型在模拟中依旧可以产生几乎所有在人和动物身上观察到的行走和奔跑的步态。
在最新的视频中,Digit已经可以完成搬运18公斤重的货物,而Cassie已经能完成户外5公里慢跑,摔倒后可以自己爬起来。2020年1月发布Digit机器人送包裹:
2021年8月发布Cassie机器人跑马拉松:
人形机器人离我们还有多远,我们期待未来特斯拉的发布会上,有真正的人形机器人出现,马斯克的梦想不仅仅是梦想......